CSM 波束形成器是一种频域算法。基本思想是将麦克风收集的数据(信号之间的时间和空间相关性)与焦点信息(麦克风与扫描平面的点之间的时间延迟和相移)分开。
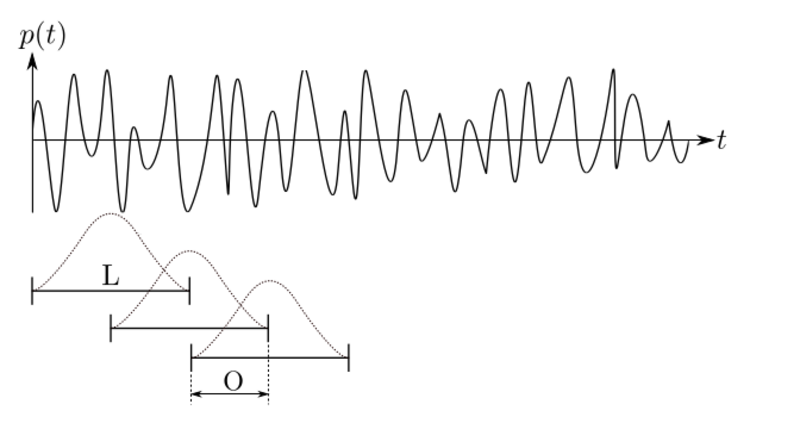
首先,麦克风捕获的信号采样被分成具有 2个n2个长度(L)。之后,以 50% 的重叠 (O) 加窗,如图 1 中的信号所示p米()米()麦克风的米米.
他们的傅里叶变换然后被平均并用于构建 CSM。使用转向矢量获得在地图的所有扫描点上聚焦或转向声学相机所需的几何信息。到达的延误j信号的大小由扫描平面和麦克风之间的已知距离以及声速 c 确定。
如果X→是一个潜在的噪声源,M 是麦克风的数量,ω 是角频率,转向矢量可以写成
G(X→,ωk)=1个电子ωk△0⋮电子ωk△−1个(T)=1个M(电子−0⋮电子−T)
使用此几何信息,可以将声学相机转向潜在的噪声源。最后,波束形成或声学图b�可以计算为
b(X→,ωk)=G†(X→T,ωk)⋅C小号米(ωk)⋅G(X→,ωk)