
The CSM beamformer is a frequency domain algorithm. The basic idea is to separate the data collected by the microphone (temporal and spatial correlation between signals) from the focus information (time delay and phase shift between the microphone and the scanning plane).
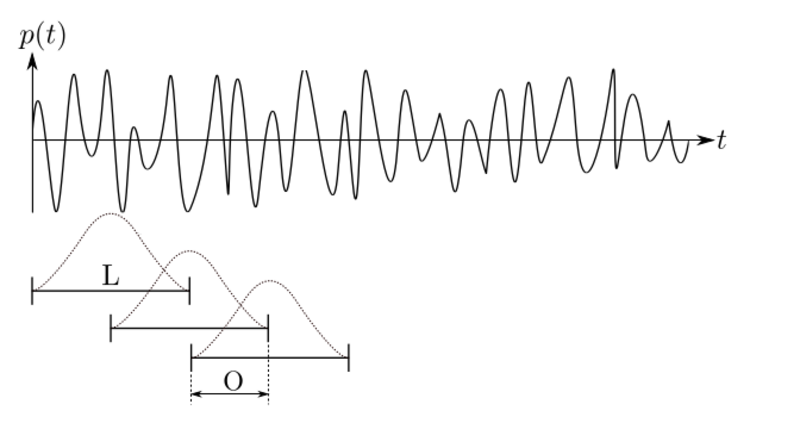
Firstly, the signal sampling captured by the microphone is divided into two n2 lengths (L). Afterwards, add a window with a 50% overlap (O), as shown in the signal in Figure 1, in meters of the microphone
Their Fourier transforms are then averaged and used to construct CSM. Use the steering vector to obtain the geometric information required to focus or turn the acoustic camera at all scanning points on the map. The size of the delayed arrival signal j is determined by the known distance between the scanning plane and the microphone, as well as the sound speed c.
If X → is a potential noise source and M is the number of microphones, ω It is the angular frequency, and the steering vector can be written as
G(X→, ω k) =1 electron ω K △ 0 ⋮ electron ω K △ -1 (T)=1 M (electron -0 ⋮ electron – T)
Using this geometric information, the acoustic camera can be directed towards potential noise sources. Finally, beamforming or acoustic mapping b can be calculated as
b(X→, ω k)=G†(X→T, ω k) C Small meter( ω k)⋅G(X→, ω k)






